Mit intelligenten Motorsteuerungen wird die industrielle Automatisierung durch Intelligenz am Edge (dezentral, am Rande des Netzwerks) unterstützt. Dies bedeutet, dass immer mehr Daten am Edge verarbeitet werden, einschließlich Sensoren, Kameras und Aktoren. Diese treffen in Echtzeit Entscheidungen auf niedriger Ebene und stellen gleichzeitig gesammelte Daten für übergeordnete Steuerungen bereit. Dadurch werden die Produktivität gesteigert und die Betriebskosten gesenkt.
Damit Aktoren Daten am Edge sammeln und verarbeiten können, ist es wichtig, dass das System ein klares Bild der normalen Betriebsbedingungen hat. Nehmen Sie zum Beispiel Reibung. Wenn ein Förderband ohne Last läuft, erfährt der Aktuator eine gewisse Reibung, die von mehreren Faktoren beeinflusst wird, darunter Länge und Gewicht des Bandes selbst. Was aber, wenn diese Reibung zunimmt? Zeigt es möglichen Verschleiß innerhalb des Systems an oder liegt es einfach daran, dass mehrere Teile auf dem Band platziert wurden? Das Tunen (Abstimmen) von Motorcontrollern ist die Grundlage um ein klares Bild der normalen Betriebsbedingungen zu erhalten. Diese können dann mit den richtigen Werkzeugen optimiert werden.
Erstens bieten Motorantriebe mit feldorientierter Steuerung (FOC) oder Vektorsteuerung die wohl höchste Leistung von allen. Die Optimierung von FOC kann jedoch mühsam sein und die Ressourcen während der Anwendungsentwicklung stark belasten. Insbesondere die Abstimmung der P- und I-Parameter erfordert Expertenwissen. Nicht nur bei der Ersteinrichtung, sondern vor allem auch, wenn die Parameter an die Anforderungen der Anwendung angepasst werden müssen.
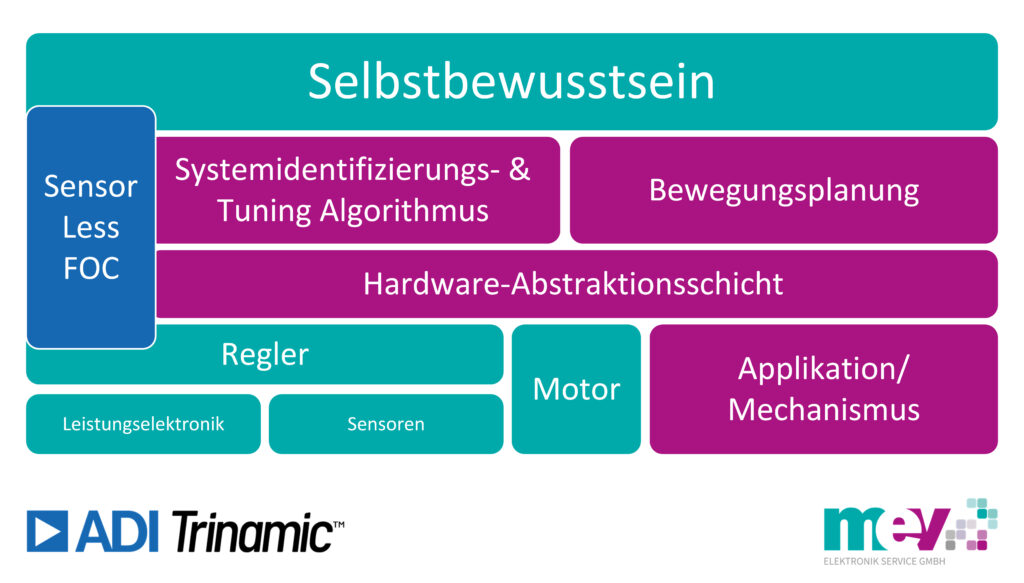
Zweitens gibt es an der Spitze der industriellen Automatisierung immer komplexer werdende Maschinen, bei denen Antriebssysteme und Sensoren am Edge Informationen sammeln und miteinander interagieren. Dies erhöht die Gesamtkomplexität und zieht Ressourcen von anderen Aspekten, einschließlich Motor- und Bewegungssteuerung, zugunsten der Entwicklung der Anwendungs- und Hardwareabstraktionsschicht ab. Darüber hinaus fügt die erhöhte Komplexität Faktoren hinzu, die bei der Motorabstimmung berücksichtigt werden, wodurch der Ingenieur beim Abstimmen der Steuerung stärker belastet wird.
Drittens wird mit zunehmender Interaktion und Komplexität eine neue Maschinengeneration an der Spitze der industriellen Automatisierung eingeführt. Eine Generation, die mit einem eingebauten “ausfallsicheren Mechanismus” ausgestattet ist, der automatisch ein Betriebsproblem erkennt, das die Maschine daran hindert, ihre Aufgabe zu erfüllen. Anschließend werde Schritte eingeleitet, um die Aufgabe vorübergehend auf andere Maschinen in der Arbeitszelle zu übertragen, bis die defekte Maschine repariert werden kann.
Das vierte Argument für Autotuning ist der schnelle Ausgleich von Fertigungstoleranzen in der Serienfertigung. Selbst mit verbesserten Montagelinien wird nicht jede Maschine zu 100 Prozent den Spezifikationen entsprechen. Einen motorischen Antrieb für die vom Fließband ausgehende Abweichung des Systems zu korrigieren, würde wiederum die Ressourcen stark belasten. Das gilt natürlich nur, wenn kein Auto-Tuning-Tool für den Motorcontroller angeboten wird.
Letztlich ermöglicht ein Auto-Tuning-Tool die Verwendung der Technologie einem größeren Personenkreis und fördern damit die Innovation. Bereits seit Jahren ist ein Trend erkennbar, dass elektronische Bauteile billiger werden. Nehmen Sie zum Beispiel hochwertige BLDC-Motoren, die einst ausschließlich für High-End-Maschinen verwendet wurden, bis Drohnen kommerziell wurden und BLDC-Motoren ein Massenprodukt wurden. Mit gesenkten Komponentenpreisen wurden diese Teile plötzlich auch in anderen Bereichen interessant und förderten die Produktentwicklung und den Durchbruch bei anderen Geräten. Indem nicht nur die Komponenten, sondern auch das Know-how leichter zugänglich gemacht wird, geben Tools zur Automatisierung des Motorcontroller-Tunings einen weiteren Innovationsimpuls. Entweder, weil sie neue Technologien auch für Unternehmen zugänglich macht, die sie sonst nicht implementieren könnten, oder weil sie wertvolle Ressourcen sparen.
Der erste Schritt der automatischen Abstimmung eines BLDC-Antriebs ähnelt der manuellen Abstimmung, bei der die Abstimmungsparameter für PI-Regler in der Anwendung identifiziert werden. Diese Abstimmungsparameter variieren je nach Anwendung und können sogar innerhalb einer Anwendung je Arbeitspunkt variieren. Beispiele sind maximales Drehmoment und maximale Drehzahl, die von der Motorlast abhängig sind, und Positionierung. Um diese Parameter zu identifizieren und zu optimieren, braucht es das reale Setup oder ein realitätsnahes Modell des elektromechanischen Systems, das alle Faktoren berücksichtigt. Der Vorteil eines solchen Ansatzes im Vergleich zur Abstimmung von PI-Reglern auf dem Prüfstand besteht darin, dass auch externe PGrößen berücksichtigt werden. Dazu gehören Spiel, Reibung und Trägheit, um nur einige zu nennen.
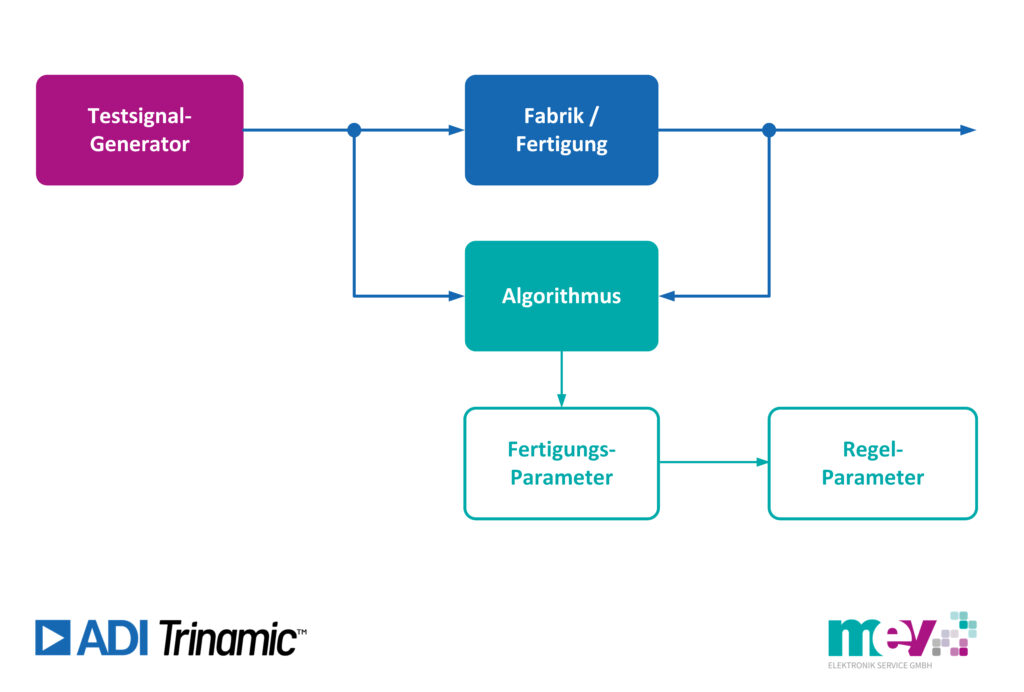
Eine Möglichkeit, diese Parameter zu identifizieren und die Anwendungsgrenzen zu finden, ist die Verwendung einer Testsignal-Injektion und -Korrelation. Vereinfacht gesagt schickt man ein Testsignal durch das System, misst die Leistung und führt sie einem Algorithmus zu, der dann die optimalen Parameter berechnet. Nach der Berechnung wird dieser erneut zur Plausibilitätsprüfung durch das System geleitet und validiert die berechneten Parameter. Es gibt jedoch eine andere Methode zur Identifizierung dieser Parameter, die dem praktischeren Ansatz der traditionellen manuellen Abstimmung durch Experten folgt.
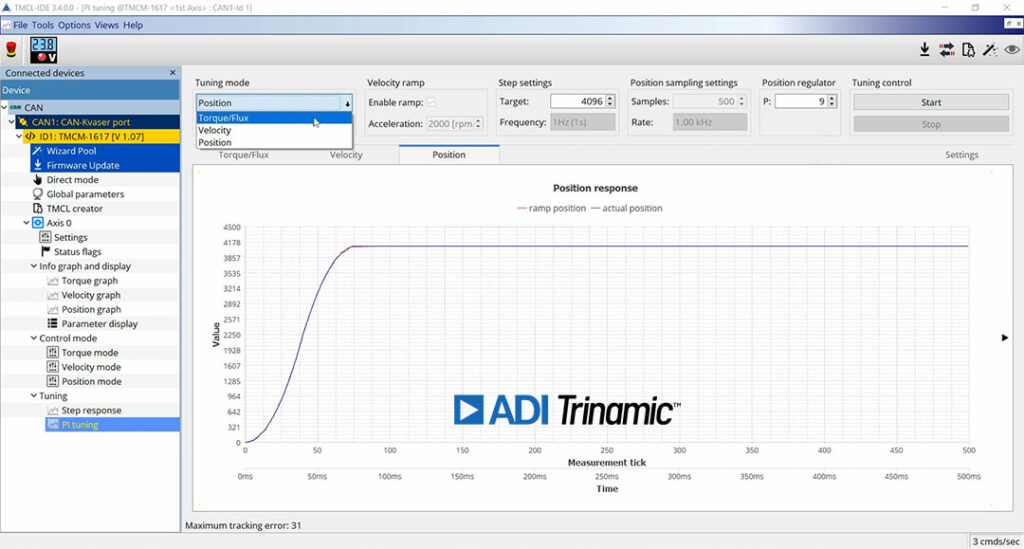
Um die Inbetriebnahme von Motorantrieben zu beschleunigen, hat Trinamic ein grafisches Tuning-Tool für seine neueste Modulgeneration mit dem integrierten Servocontroller-IC TMC4671 entwickelt. Dieses Tool ist kostenlos in der integrierten Entwicklungsumgebung (TMCL-IDE) verfügbar, mit dem Hauptziel, die P- und I-Parameter der kaskadierten Motorsteuerungsstruktur automatisch abzustimmen.
Dieser Abstimmungsprozess funktioniert wie folgt: Zuerst werden die Parameter des FOC-Stromkreises, zweitens die Geschwindigkeits- und schließlich der Lageregelkreis abgestimmt. Während des Abstimmungsprozesses werden Schritt- oder Rampeneingänge an die kaskadierten Regelkreise des Frequenzumrichters angelegt. Die Reaktion wird im Modul erfasst und das TMCL-IDE-Tool erhöht iterativ die Regelverstärkungen, um die Tracking-Performance und -Dynamik zu optimieren. Das Tool führt den Benutzer Schritt für Schritt durch diesen Prozess und der Entwickler kann das Ergebnis jeder Iteration überwachen. Idealerweise wird das Setup innerhalb der Anwendung abgestimmt und der Motor kann sich frei drehen.
Zunächst werden die Parameter des FOC-Stromreglers, als innerster und schnellster Regelkreis, optimiert. Dafür legt ein Stufengenerator für den Sollstrom definierte Stromstufen an den FOC-Regler an. Der Wert des Schritts kann entsprechend dem Betriebspunkt der Benutzeranwendung gewählt werden. Das Tuning-Tool visualisiert die Sollwerte und die Reaktionen und entscheidet anhand der Daten, wie das Regelverhalten verbessert werden kann. Es aktualisiert dann automatisch die P- und I-Parameter der FOC-Stromschleife, bis ein minimaler Regelfehler erreicht ist und das Stromregler-Tuning beendet ist.
Der zweite Schritt ist das Tunen des Geschwindigkeitsreglers. Während dieses Vorgangs kann die Geschwindigkeitsrampe verwendet und die Beschleunigung entsprechend den Anwendungsanforderungen eingestellt werden. Der Benutzer kann die Zielgeschwindigkeit auswählen, zu der die P- und I-Parameter des Geschwindigkeitsregelkreises am besten passen sollen. Dann generiert der Signalgenerator im Tuning-Tool Zielgeschwindigkeitsschritte. Die tatsächliche Geschwindigkeitsantwort des Motors wird gemessen und die P- und I-Parameter werden ständig aktualisiert. Nachdem der Geschwindigkeitsfehler minimiert wurde, ist das Geschwindigkeits-Autotuning abgeschlossen.
Als letzter Schritt wird der P-Parameter des Positionsreglers optimiert. Daher führt der Motor Zielpositionsschritte aus, die Ist-Position wird gemessen und der Abstimmalgorithmus passt den P-Parameter an, bis ein minimaler Positionsfehler erreicht wird.
Die resultierenden P- und I-Werte aus dem Autotuning-Prozess können auch im manuellen Modus dieses Tools getestet und angepasst werden. In diesem Modus können kontinuierliche Sprungantworten für die Positions-, Geschwindigkeits- oder Stromschleife simuliert und die resultierenden Ist-Werte aller Regler überwacht und zur Echtzeit-Anpas sung der P- und I-Parameter verwendet werden.
Damit Maschinen ihre Leistungsparameter unabhängig anpassen und eine zugewiesene Aufgabe erledigen oder sich selbst für ein optimiertes Verhalten basierend auf der Eingabe eines produktivitätssteigernden KI-Beobachteralgorithmus neu konfigurieren können, ist Auto-Tuning die einzige Option. Dies kann durch Überwachen und Autotuning der P- und I-Werte erreicht werden, die von den drei kaskadierten FOC-Regelschleifen abgeleitet werden. Diese werden verwendet um den Torque/Flux-Stromregler, den Geschwindigkeitsregler und den Positionsregler des Antriebs zu optimieren. Die perfekte Abstimmung von Controllern wird daher nicht mehr durch ihre Einstellungen bei der Ersteinrichtung definiert. Stattdessen bedarf es einer ständigen Überwachung und Anpassung.
Mit dem intuitiven Auto-Tuning-Tool macht die neueste Generation von Motorsteuerungen von ADI Trinamic einen ersten Schritt zu intelligenten Systemen und ebnet den Weg für selbstbewusste Maschinen, welche die nächste Revolution in der industriellen Automatisierung markieren. Auto-Tuning wird sich als entscheidend für diesen nächsten Durchbruch erweisen. Sowohl für die Ersteinrichtung als auch für die Neukonfiguration der Geräte, um ihr Verhalten zu optimieren. Durch die kontinuierliche Überwachung von Drehmoment-, Geschwindigkeits- und Positionsparametern und deren Vergleich mit einem Modell passt der Antrieb inkohärente Daten an oder markiert sie. So wird der Aktor zu einem zusätzlichen Sensor, der Intelligenz am Edge ermöglicht.
Die nächste Evolutionsstufe der industriellen Automatisierung bringt selbstbewusste Maschinen für maximale Produktivität, verlängerte Betriebslebensdauer und reduzierte Wartungskosten. Dies erfordert Motor- und Motion-Controller mit einem hohen Integrationsgrad, die feststellen können, ob sich alles entsprechend verhält oder ob Leistungsparameter im laufenden Betrieb durch Neukonfiguration geändert werden müssen. Einmal per Auto-Tuning perfektioniert, können Motorcontroller sowohl interne Probleme wie Drahtbrüche oder eine verringerte Impedanz der Endstufe als auch externe Prozesse überwachen die das Verhalten der Anwendung beeinflussen, wie z.B. Reibung, Massen-Trägheit, Temperatur und Spiel.
Wenn die am Edge gesammelten Daten nicht nur für Autotuning-Zwecke verwendet, sondern zusammen mit Daten externer Komponenten zusammengefasst werden und auf andere Maschinen in der Fabrik verteilt werden, geht die industrielle Automatisierung einen wichtigen Schritt in die Zukunft. Stellen Sie sich Maschinen vor, die in einer Fertigungszelle zusammenarbeiten. Jeder Maschine wird eine bestimmte Aufgabe zugewiesen, die zur Herstellung eines Produkts erforderlich ist. Wenn eine Maschine in dieser Zelle bei der Erfüllung ihrer spezifischen Aufgabe ein Problem hat, würde die Produktionslinie bis zur Wartung heruntergefahren. Stellen wir uns nun dasselbe Szenario mit selbstbewussten Maschinen vor. In diesem Szenario würden die anderen Maschinen in der Fertigungszelle erkennen, dass eine Maschine ihre Aufgabe nicht erfüllt und dann automatisch die spezifische Funktion der dieser fehlerhaften Maschine vorübergehend auf die anderen Maschinen in der Zelle auslagern. Damit würde die Produktion am Laufen bleiben bis ein Techniker verfügbar ist, um die fehlerhafte Maschine zu reparieren. Auto-Tuning mag wie ein kleiner Schritt erscheinen. Mit ADI Trinamic ist es jedoch der erste Schritt zu selbstbewussten Maschinen.
Bei Fragen zum Auto-Tuning von ADI Trinamic wenden Sie sich bitte an:
Guido Gandolfo, Product Line Manager Motion Control
+49 5424 2340-57
ggandolfo@mev-elektronik.com












